作為全球*大雇主排行榜第十位的富士康,攜手阿里14億布局機器人行業,*有新聞報道出3C機器人未來5年需求或達30萬臺,可見機器人是未來發展趨勢。從*初的普銑到現在的數控銑床(數控加工中心),人們對加工精度、批量化自動化生產提出了*高的要求,這就實現了數控加工中心和機器人的相結合,數控加工中心上下料機器人由此誕生。
在用數控加工中心加工輪轂等大型零件時,負載可達幾十公斤重,其外形也大多是盤類件。這類加工件數量大,機床幾乎要24小時運行。在歐美等發達國家早已采用機器手來自動上料和下料,代替了人工。下面就以一個盤類零件的加工為例,概括性地介紹數控加工中心上下料機器人。
數控加工中心上下料機器人工作原理
數控加工中心上下料機器人要根據加工零件的形狀及加工工藝的不同,來采用不同的手爪抓取系統。而完成抓取,搬運和取走過程的運動機構就是大型直角坐標機器人,它們通常就是一個水平運動軸(X軸)和上下運動軸(Z軸)。被加工零件形狀和重量不同所采用的手爪形狀及結構也不同,手爪的類型及尺寸要根據具體的零件及加工工藝來定。
一、 機械結構
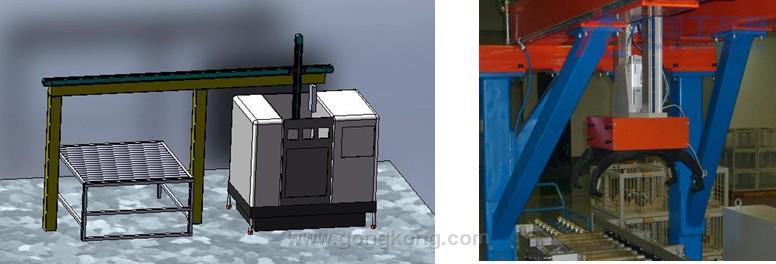
通常毛坯料和加工完的工件分別放置在數控加工中心的一側或兩側。圖1中給出的兩個例子是*常見的上下料和機床位置關系。
這里Z軸,手爪系統和毛坯件的總重量通常是100到300公斤。對于負載重量小及抓取后不需轉動處理(下料時),Z軸就用單根的LM-A44結構。如果負載較重或及下料時負載還要被轉動,Z軸就用如圖2的雙根加強型的LM-A88結構。LM-A44結構可以抓取60公斤重負載,LM-A88可以抓取300公斤重負載。Z軸的有效行程從200mm到2000mm,可以滿足常見的數控加工中心上下料要求。
整體效果圖 Z軸LM-A88抓取軸
X軸的行程較長,小負載時采用一根PAS44BB或兩根PAS43BB結構。大負載時采用兩根PAS44BB結構或加強型PAS88BB結構。X軸的負載是指Z軸,手爪系統和毛坯件的總重量。X軸的負載從200公斤到800公斤,其標準的有效行程*長達5600mm。特殊要求X軸的負載可達3000公斤,其有效行程*長達12000mm。 通常情況下采用一個X軸,兩個Z軸結構,其中一個Z軸僅用于上料,另一個Z軸僅用于下料。這是Z軸可以是齒型帶傳動,而X軸要采用齒輪齒條傳動方式。
二、 傳動方式及運動參數
標準型X軸和Z軸采用齒型帶傳動,其運行速度根據負載大小及行程*高可達5米/秒。但實際中我們常用的運行速度是0.5~1米/秒, 小負載時達到2米/秒。
對于大負載或行程超過6000mm時,通常采用齒輪齒條傳動方式,這時運行速度低些。
采用齒型帶傳動時其高速運行后重服定位精度是0.05mm。采用精密性齒型帶傳動時其重服定位精度是0.02mm。這對機床上料來說精度足夠了。
要根據所加工工件的不同,來選擇合適的手爪。根據負載及其轉動慣量、行程、運動速度(*大速度、加速度等)等來選取合式型號的直線運動單元(X軸和Z軸)、所配驅動電機、減速機和數控系統等。針對用戶需求進行選型,每個環節都保證足夠高的安全系數,保證長期、高精度、高速、高效地工作。
三 、動作描述
為了提高效率通常采用兩臺機器人,一個用于上料,一個用于下料。整個上下料過程主要由兩步完成,無論采用一個機械手還是采用兩個Z軸系統,其工作過程幾乎完全一樣:1 抓取毛坯及放到工作臺卡盤上過程;2從工作臺卡盤取下零件及放置到特定位置過程。下面分別加以簡單描述:
1、 抓取毛坯及放到工作臺卡盤上過程:
毛坯料通常由鏈條式傳送帶運輸到指定的位置,由氣動或電動定位機構進行初步定位,保證每次機器人從同一位置抓取零件。當X軸向右運動到毛坯料前方時停止運動,Z軸向下運動使張開的手爪剛好能抓住毛坯件。這時閉合手爪抓住毛坯。然后Z向上運動到指定高度后(不會發生碰撞),X軸向左運動到工作臺卡盤正上方,然后Z軸向下運動把毛坯裝入卡盤或工裝內。然后卡盤夾緊,Z軸上升到超出機床防護罩上方,X軸再運動到毛坯上方或等待卡盤上方。
2、 從工作臺卡盤取下零件及放置到特定位置過程:
當X軸運動到卡盤的正上方后,Z軸向下運動使手爪剛好能抓住工件,然后給氣壓使手爪合并抓住工件,這時機械手的控制系統控制液壓卡盤松開,當控制系統得到卡盤松開信號后,Z軸向上運動到出來機床防護板,然后X軸向左運動(取決于放下料的位置)把工件運動到放料位置正上方。這時Z軸下降到工件落到放料件上,在張開手爪及提升Z軸,從而完成取料及放料過程。
四、 控制系統簡介
在上下料過程中要與機床工作臺運動及卡盤張緊等精確協調,嚴格按信號流順序來控制上下料過程。在放下加工好的零件和取要加工的新零件時也必須與其配套的設施精確同步協調。這里的到位和離開等開關信號要高質量高可靠,必須以安全為主,確保每個步驟能夠合理銜接,控制系統的信號撲捉速度要快。專業設計人員精通數控系統和數控機床,步進電機,伺服電機,氣動手爪等相關產品,借鑒百格拉類似的機器人項目,可在短時間內對各個運動節拍進行合理安排和設計,保證上下料機器人高效、協調、安全、長期可靠地工作。
以上僅簡單介紹為立式加工中心上下料原理性動作過程,還有其它車床、磨床和沖床等設備設計了上下料機器人。
五、 結束語
在德國幾乎所有批量加工都采用機器人自動上下料。但根據要加工工件的幾何形狀,加工工藝和工作節拍不同,所采取的手爪和機器人的型號也有所區別。如加工工件不同或加工工件時間較長,可選用不同的手爪結構,用單臺機器人對多臺機床進行上下料,或是多臺機器人聯機上下料實現自動化。